
Raspberry Pi Robot Projeleri
İçindekiler
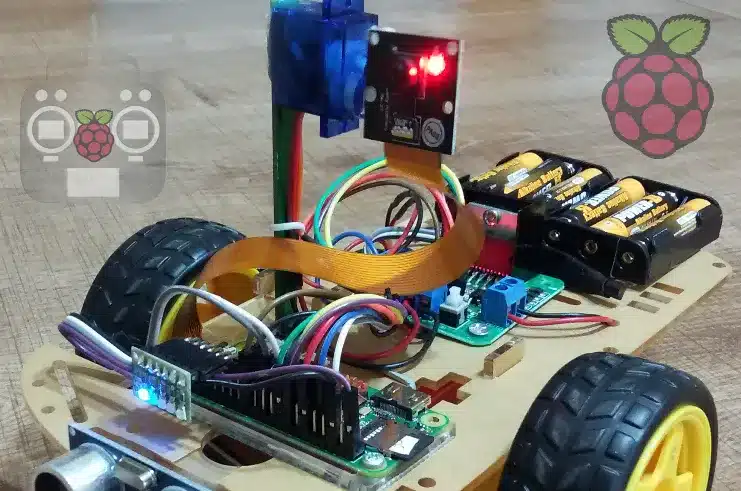
Toggle🤖 Raspberry Pi Robot Projeleri: Raspberry Pi ile akıllı robotlar yapmaya ne dersiniz? Yapay zeka, görüntü işleme ve uzaktan kontrol özellikleriyle gelişmiş robotlar tasarlayabilirsiniz!
Bu rehberde, Raspberry Pi kullanarak yapabileceğiniz farklı robot projelerini, donanım bağlantılarını, yazılım kurulumlarını ve örnek kodları adım adım anlatacağız. Kodlama bilginiz olmasa bile kolayca uygulayabilirsiniz! 🚀
🔧 1. Gerekli Malzemeler
📌 Seçtiğiniz projeye göre ihtiyacınız olan malzemeler değişebilir. İşte genel olarak gerekli bileşenler:
✔️ Raspberry Pi 3, 4 veya Zero 2 W
✔️ Motor Sürücü Kartı (L298N veya TB6612FNG önerilir)
✔️ DC Motorlar + Tekerlekler veya Servo Motorlar
✔️ Lipo veya Li-ion Batarya (7.4V veya 12V önerilir)
✔️ Ultrasonik Sensör (HC-SR04) veya Lidar Sensörü
✔️ Raspberry Pi Kamera Modülü (Görüntü işleme için)
✔️ Wi-Fi Modülü veya Bluetooth (Uzaktan kontrol için)
📌 Ekstra: Robot kol veya yüz tanıma eklemek için ek servo motorlar ve OpenCV kütüphanesi kullanılabilir!
🚗 2. Otonom Engel Algılayan Robot (Raspberry Pi ile)
🔹 Sensörler ve motor kontrolü kullanarak engellerden kaçabilen bir robot yapabilirsiniz.
📌 Gereken Malzemeler:
✔️ Raspberry Pi 4 veya Zero 2 W
✔️ L298N Motor Sürücü Modülü
✔️ 2 Adet DC Motor + Tekerlekler
✔️ HC-SR04 Ultrasonik Sensör
📌 Python Kodu: Raspberry Pi ile Engel Algılama ve Hareket
import RPi.GPIO as GPIO
import time
GPIO.setmode(GPIO.BCM)
TRIG = 23
ECHO = 24
MOTOR_L1 = 17
MOTOR_L2 = 27
MOTOR_R1 = 22
MOTOR_R2 = 10
GPIO.setup(TRIG, GPIO.OUT)
GPIO.setup(ECHO, GPIO.IN)
GPIO.setup([MOTOR_L1, MOTOR_L2, MOTOR_R1, MOTOR_R2], GPIO.OUT)
def ileri():
GPIO.output(MOTOR_L1, True)
GPIO.output(MOTOR_L2, False)
GPIO.output(MOTOR_R1, True)
GPIO.output(MOTOR_R2, False)
def dur():
GPIO.output([MOTOR_L1, MOTOR_L2, MOTOR_R1, MOTOR_R2], False)
def geri():
GPIO.output(MOTOR_L1, False)
GPIO.output(MOTOR_L2, True)
GPIO.output(MOTOR_R1, False)
GPIO.output(MOTOR_R2, True)
def sag():
GPIO.output(MOTOR_L1, True)
GPIO.output(MOTOR_L2, False)
GPIO.output(MOTOR_R1, False)
GPIO.output(MOTOR_R2, True)
def sol():
GPIO.output(MOTOR_L1, False)
GPIO.output(MOTOR_L2, True)
GPIO.output(MOTOR_R1, True)
GPIO.output(MOTOR_R2, False)
def mesafe_olc():
GPIO.output(TRIG, True)
time.sleep(0.00001)
GPIO.output(TRIG, False)
while GPIO.input(ECHO) == 0:
pulse_start = time.time()
while GPIO.input(ECHO) == 1:
pulse_end = time.time()
return (pulse_end - pulse_start) * 17150
while True:
mesafe = mesafe_olc()
if mesafe > 20:
ileri()
else:
dur()
geri()
time.sleep(0.5)
sag()
time.sleep(0.5)
📌 Kod Açıklaması:
✔️ Ultrasonik sensör ile mesafe ölçülür.
✔️ Eğer bir engel algılanırsa, robot geri gidip yön değiştirir.
📌 Ekstra: PID kontrolü ile daha hassas hareketler ekleyebilirsiniz!

📸 3. Yüz Tanıyan ve Takip Eden Robot (OpenCV ile)
🔹 Kamera ve yapay zeka desteği ile insan yüzlerini algılayarak takip eden bir robot yapabilirsiniz.
📌 Gereken Malzemeler:
✔️ Raspberry Pi 4 veya Zero 2 W
✔️ Raspberry Pi Kamera Modülü
✔️ Servo Motorlar (Kamera hareketi için)
✔️ OpenCV Kütüphanesi (Python ile yüz tanıma için)
📌 Python Kodu: Yüz Algılama ve Hareket
import cv2
face_cascade = cv2.CascadeClassifier('haarcascade_frontalface_default.xml')
cap = cv2.VideoCapture(0)
while True:
ret, frame = cap.read()
gray = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)
faces = face_cascade.detectMultiScale(gray, 1.3, 5)
for (x, y, w, h) in faces:
cv2.rectangle(frame, (x, y), (x + w, y + h), (255, 0, 0), 2)
cv2.imshow('Face Recognition', frame)
if cv2.waitKey(1) & 0xFF == ord('q'):
break
cap.release()
cv2.destroyAllWindows()
📌 Kod Açıklaması:
✔️ OpenCV kullanılarak yüz algılanır.
✔️ Servo motorları ekleyerek kameranın yüzü takip etmesini sağlayabilirsiniz.
📌 Ekstra: Yüz tanıma modelini eğiterek belirli kişileri tanıyabilir hale getirebilirsiniz!
✋ 4. Raspberry Pi ile Robotik Kol Yapımı
🔹 Servo motorlar kullanarak programlanabilir bir robot kol yapabilirsiniz.
📌 Gereken Malzemeler:
✔️ Raspberry Pi 4 veya Zero 2 W
✔️ 4-6 Adet Servo Motor (MG995 önerilir)
✔️ Robot Kol Gövdesi (Ahşap, 3D baskı veya LEGO)
✔️ PWM Servo Kontrol Modülü (16 Kanal – PCA9685 önerilir)
📌 Python Kodu: Temel Servo Kontrol
import RPi.GPIO as GPIO
import time
servo_pin = 17
GPIO.setmode(GPIO.BCM)
GPIO.setup(servo_pin, GPIO.OUT)
servo = GPIO.PWM(servo_pin, 50)
servo.start(7.5)
def hareket():
servo.ChangeDutyCycle(5) # 0 derece
time.sleep(1)
servo.ChangeDutyCycle(7.5) # 90 derece
time.sleep(1)
servo.ChangeDutyCycle(10) # 180 derece
time.sleep(1)
hareket()
servo.stop()
GPIO.cleanup()
📌 Kod Açıklaması:
✔️ Servo motorlar belirlenen açılara göre hareket eder.
✔️ Robot kol, belirlenen açılar doğrultusunda nesneleri tutup bırakabilir.
📌 Ekstra: Kamera ekleyerek robot kolun nesneleri tanıyıp hareket etmesini sağlayabilirsiniz!
📌 Sonuç: Raspberry Pi ile Robotunuzu Yapın!
🎯 Bu rehber sayesinde Raspberry Pi ile kendi robot projelerinizi oluşturmayı öğrendiniz!
💡 Özetle:
✔️ Engel algılayan ve yön değiştiren otonom bir robot yaptınız.
✔️ Yüz tanıma ve nesne takip özellikleri eklediniz.
✔️ Servo motorlarla hareket edebilen bir robot kol tasarladınız.
✔️ Uzaktan kontrol veya yapay zeka ekleyerek robotunuzu geliştirdiniz.
📢 Sizce en iyi Raspberry Pi robot projesi hangisi? Yorumlarda paylaşın! 👇😊










Yorum Yaz