Kendi Otonom Aracınızı Yapın
İçindekiler
Toggle🚗 Kendi Otonom Aracınızı Yapın: Tamamen kendi başına hareket edebilen bir otonom araç yapmak ister misiniz? Bu projede, Raspberry Pi ve Arduino kullanarak engellerden kaçan, yol çizen, trafik işaretlerini algılayan ve hatta yapay zeka ile kararlar veren bir araç yapacağız!
Bu rehberde, gerekli donanımları, montaj adımlarını, elektronik devre bağlantılarını, yazılım kurulumlarını ve Python ile otonom sürüş algoritmalarını adım adım anlatacağız. Kodlama veya elektronik bilginiz olmasa bile kolayca uygulayabilirsiniz! 🚀
🔧 1. Gerekli Malzemeler
📌 Otonom bir araç yapmak için aşağıdaki bileşenlere ihtiyacınız var:
✔️ Raspberry Pi 4 veya Zero 2 W (Yapay zeka ve görüntü işleme için)
✔️ Arduino Uno veya Mega (Düşük seviyeli motor kontrolü için, opsiyonel)
✔️ L298N Motor Sürücü Kartı (DC motorları kontrol etmek için)
✔️ 4 Adet DC Motor + 4 Adet Tekerlek
✔️ Raspberry Pi Kamera Modülü (Yol algılama için)
✔️ Ultrasonik Sensör (HC-SR04) veya Lidar Sensörü (Engel algılama için)
✔️ IMU Sensörü (MPU6050 – Araç dengesini sağlamak için)
✔️ Li-ion Batarya veya Lipo Batarya (7.4V veya 12V önerilir)
✔️ Wi-Fi veya Bluetooth Modülü (Uzaktan kontrol için, opsiyonel)
📌 Ekstra: GPS modülü ekleyerek aracın belirli rotalar üzerinden gitmesini sağlayabilirsiniz!
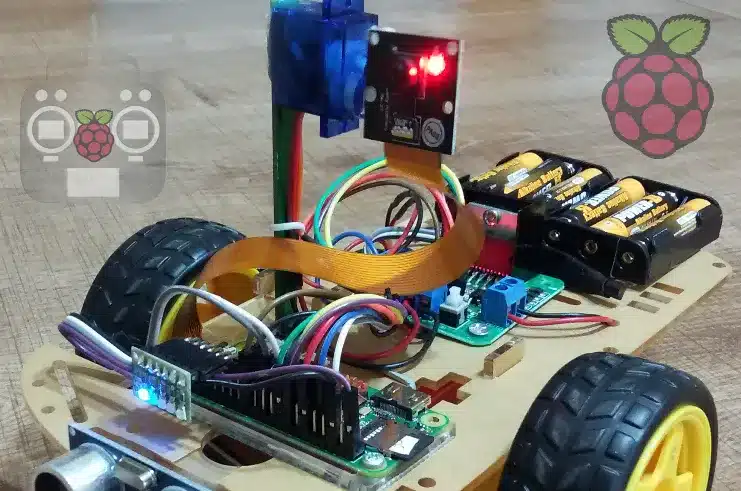
🚗 2. Otonom Aracın Gövdesini ve Şasisini Hazırlama
🔹 Aracınızın gövdesini hazır satın alabilir veya kendiniz yapabilirsiniz.
📌 Seçenek 1: Hazır Robot Araba Kiti Kullanma
✔️ Amazon veya Aliexpress’ten akrilik veya plastik bir şasi satın alabilirsiniz.
📌 Seçenek 2: 3D Yazıcı ile Gövde Yapma
✔️ Thingiverse veya benzeri sitelerden 3D yazıcı için araba gövdesi tasarımları indirerek kendi şasinizi oluşturabilirsiniz.
📌 Seçenek 3: Ahşap veya Metal Kullanarak Kendi Çerçevenizi Yapma
✔️ Dayanıklı malzemeler kullanarak motorları ve devreleri monte edebileceğiniz bir araç çerçevesi oluşturabilirsiniz.
📌 Ekstra: Aracınızın dengesini artırmak için ağırlık merkezini yere yakın tutmalısınız!
⚙️ 3. Motor, Sensör ve Elektronik Bağlantıları Yapma
🔹 Motorları, motor sürücü kartını ve sensörleri doğru şekilde bağlamanız gerekiyor.
📌 Adım 1: Motorları L298N Motor Sürücüye Bağlayın
✔️ Sağ motor → L298N’in OUT1 ve OUT2 pinlerine bağlanır.
✔️ Sol motor → L298N’in OUT3 ve OUT4 pinlerine bağlanır.
📌 Adım 2: Motor Sürücüyü Raspberry Pi’ye Bağlayın
✔️ IN1 → GPIO 17
✔️ IN2 → GPIO 18
✔️ IN3 → GPIO 22
✔️ IN4 → GPIO 23
📌 Adım 3: Ultrasonik Sensörü Bağlayın
✔️ TRIG → GPIO 5
✔️ ECHO → GPIO 6
📌 Adım 4: Raspberry Pi Kamerasını Bağlayın
✔️ Kamera CSI portuna takılır ve Raspberry Pi’den aktif hale getirilir.
📌 Ekstra: GPS modülü bağlayarak otonom aracın belirli koordinatlara gitmesini sağlayabilirsiniz!
💻 4. Python ile Otonom Sürüş Algoritması Yazma
📌 Kod Örneği: Engellerden Kaçan Otonom Araç (Raspberry Pi ile)
import RPi.GPIO as GPIO
import time
GPIO.setmode(GPIO.BCM)
TRIG = 5
ECHO = 6
MOTOR_L1 = 17
MOTOR_L2 = 18
MOTOR_R1 = 22
MOTOR_R2 = 23
GPIO.setup(TRIG, GPIO.OUT)
GPIO.setup(ECHO, GPIO.IN)
GPIO.setup([MOTOR_L1, MOTOR_L2, MOTOR_R1, MOTOR_R2], GPIO.OUT)
def ileri():
GPIO.output(MOTOR_L1, True)
GPIO.output(MOTOR_L2, False)
GPIO.output(MOTOR_R1, True)
GPIO.output(MOTOR_R2, False)
def dur():
GPIO.output([MOTOR_L1, MOTOR_L2, MOTOR_R1, MOTOR_R2], False)
def geri():
GPIO.output(MOTOR_L1, False)
GPIO.output(MOTOR_L2, True)
GPIO.output(MOTOR_R1, False)
GPIO.output(MOTOR_R2, True)
def saga_don():
GPIO.output(MOTOR_L1, True)
GPIO.output(MOTOR_L2, False)
GPIO.output(MOTOR_R1, False)
GPIO.output(MOTOR_R2, True)
def sola_don():
GPIO.output(MOTOR_L1, False)
GPIO.output(MOTOR_L2, True)
GPIO.output(MOTOR_R1, True)
GPIO.output(MOTOR_R2, False)
def mesafe_olc():
GPIO.output(TRIG, True)
time.sleep(0.00001)
GPIO.output(TRIG, False)
while GPIO.input(ECHO) == 0:
pulse_start = time.time()
while GPIO.input(ECHO) == 1:
pulse_end = time.time()
return (pulse_end - pulse_start) * 17150
while True:
mesafe = mesafe_olc()
if mesafe > 20:
ileri()
else:
dur()
geri()
time.sleep(0.5)
saga_don()
time.sleep(0.5)
📌 Kod Açıklaması:
✔️ Ultrasonik sensör ile mesafe ölçülür.
✔️ Engel algılanırsa, araç geri gidip yön değiştirir.
📌 Ekstra: PID kontrolü ekleyerek daha hassas dönüşler sağlayabilirsiniz!
📡 5. Aracınızı Wi-Fi veya Bluetooth ile Uzaktan Kontrol Edin
🔹 Telefon veya bilgisayardan otonom aracınızı kontrol etmek için Wi-Fi veya Bluetooth ekleyebilirsiniz.
📌 Gereken Ekstra Bileşenler:
✔️ ESP8266 Wi-Fi Modülü veya HC-05 Bluetooth Modülü
✔️ Flask (Web sunucu ile kontrol etmek için Python kütüphanesi)
📌 Ekstra: Aracı sesli komutlarla kontrol etmek için Google Assistant veya Alexa entegrasyonu ekleyebilirsiniz!
📌 Sonuç: Kendi Otonom Aracınızı Yapın!
🎯 Bu rehber sayesinde Raspberry Pi ile kendi otonom aracınızı yapmayı öğrendiniz!
💡 Özetle:
✔️ Araç şasisini 3D yazıcı, ahşap veya hazır kit ile yaptınız.
✔️ Motorları ve sensörleri Raspberry Pi’ye bağladınız.
✔️ Python kodlarıyla otonom sürüş algoritması oluşturdunuz.
✔️ Yapay zeka, GPS veya Wi-Fi desteği ekleyerek aracınızı geliştirdiniz.
📢 Sizce en iyi otonom araç tasarımı nasıl olmalı? Yorumlarda paylaşın! 👇😊










Yorum Yaz