- Beetekno ile tüm teknoloji gelişmelerinden anında haberdar olmak için uygulamamızı indirip bildirimlerinizi açmayı unutmayın!




Sitemize üye olarak beğendiğiniz içerikleri favorilerinize ekleyebilir, kendi ürettiğiniz ya da internet üzerinde beğendiğiniz içerikleri sitemizin ziyaretçilerine içerik gönder seçeneği ile sunabilirsiniz.
Sitemize üye olarak beğendiğiniz içerikleri favorilerinize ekleyebilir, kendi ürettiğiniz ya da internet üzerinde beğendiğiniz içerikleri sitemizin ziyaretçilerine içerik gönder seçeneği ile sunabilirsiniz.
Üyelerimize Özel Tüm Opsiyonlardan Kayıt Olarak Faydalanabilirsiniz

Kendin Yap Robot Projeleri
 0
0
Mutlu
 0
0
Eğlenmiş
 0
0
Şaşırmış
 0
0
Kızgın

Üzgün

🤖 Arduino ile Basit Robot Yapımı: Arduino kullanarak kendi robotunuzu yapmak ister misiniz? Bu rehberde, engellerden kaçabilen basit bir otonom robot yapımını adım adım anlatacağız.
Bu robot, ultrasonik sensör kullanarak çevresindeki nesneleri algılar ve yönünü değiştirerek hareket eder. Elektronik veya kodlama bilginiz olmasa bile kolayca uygulayabilirsiniz! 🚀
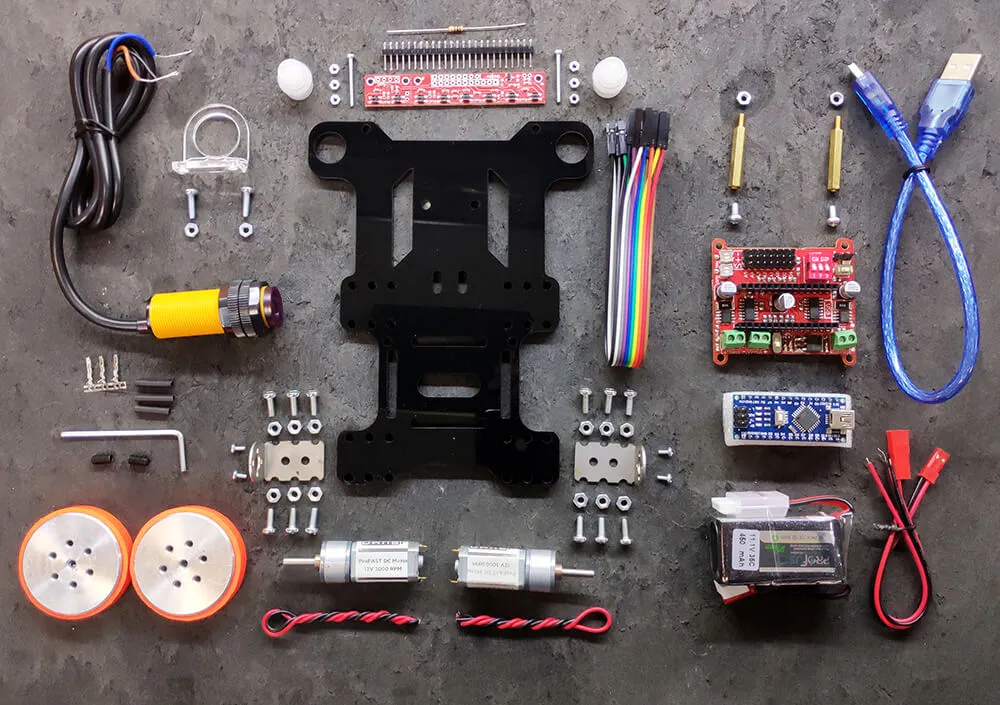
📌 Basit bir Arduino tabanlı robot yapmak için aşağıdaki bileşenlere ihtiyacınız var:
✔️ Arduino Uno veya Arduino Nano
✔️ L298N Motor Sürücü Modülü
✔️ 2 Adet DC Motor + 2 Adet Tekerlek
✔️ HC-SR04 Ultrasonik Sensör (Engel algılama için)
✔️ Li-ion Pil veya 9V Batarya (Güç kaynağı için)
✔️ Mini Servo Motor (Sensörü hareket ettirmek için, opsiyonel)
✔️ Jumper Kablolar ve Lehim Teli
📌 Ekstra: Bluetooth veya Wi-Fi modülü ekleyerek robotu uzaktan kontrol edebilirsiniz!
🔹 Robotun şasisini satın alabilir veya kendiniz yapabilirsiniz.
📌 Seçenek 1: Hazır Robot Şasisi Kullanma
✔️ Amazon veya Aliexpress gibi platformlardan akrilik veya plastik robot şasisi alabilirsiniz.
📌 Seçenek 2: Karton veya Ahşap Kullanarak Gövde Yapma
✔️ Dayanıklı mukavva veya kontrplak kullanarak motorları ve devreleri monte edebileceğiniz bir gövde yapabilirsiniz.
📌 Seçenek 3: 3D Yazıcı Kullanarak Şasi Basma
✔️ Thingiverse veya benzeri sitelerden 3D yazıcı için robot gövdesi tasarımları indirerek kendi şasinizi oluşturabilirsiniz.
📌 Ekstra: Tekerleklerin daha iyi kavrama sağlaması için silikon kaplama kullanabilirsiniz!
🔹 Motorları, motor sürücü kartını ve sensörleri doğru şekilde bağlamanız gerekiyor.
📌 Adım 1: Motorları L298N Motor Sürücüye Bağlayın
✔️ Sağ motoru L298N’in OUT1 ve OUT2 pinlerine bağlayın.
✔️ Sol motoru L298N’in OUT3 ve OUT4 pinlerine bağlayın.
📌 Adım 2: Motor Sürücüyü Arduino’ya Bağlayın
✔️ IN1 → Arduino D5
✔️ IN2 → Arduino D6
✔️ IN3 → Arduino D9
✔️ IN4 → Arduino D10
📌 Adım 3: Ultrasonik Sensörü Bağlayın
✔️ VCC → 5V
✔️ GND → GND
✔️ Trig → Arduino D7
✔️ Echo → Arduino D8
📌 Adım 4: Bataryayı Bağlayın
✔️ L298N üzerindeki + ve – uçlarını pil kutusuna bağlayın.
📌 Ekstra: Sensörü hareket ettirmek için bir servo motor ekleyebilirsiniz!
📌 Kod Örneği: Engellerden Kaçan Otonom Robot
📌 Kod Açıklaması:
✔️ Robot, HC-SR04 sensörünü kullanarak çevresindeki engelleri algılar.
✔️ Eğer 10 cm’den daha yakın bir engel varsa, robot geri hareket eder ve yön değiştirir.
✔️ Engel yoksa robot düz bir şekilde ilerler.
📌 Ekstra: PID algoritması ekleyerek daha hassas yönlendirme yapabilirsiniz!
🔹 Bluetooth veya Wi-Fi modülü ekleyerek robotunuzu uzaktan kontrol edebilirsiniz.
📌 HC-05 Bluetooth Modülü Bağlantısı:
✔️ VCC → 5V
✔️ GND → GND
✔️ TX → RX (Arduino D2)
✔️ RX → TX (Arduino D3)
📌 Telefon Uygulaması:
✔️ Arduino Bluetooth Controller gibi bir uygulama kullanarak robotunuzu yönlendirebilirsiniz.
🔹 Robotunuzu daha gelişmiş hale getirmek için farklı özellikler ekleyebilirsiniz.
📌 Önerilen Geliştirmeler:
✔️ Lidar Sensörü Ekleyerek Daha Hassas Engel Algılama
✔️ Kamera Modülü ile Görüntü İşleme ve Nesne Takibi
✔️ Güneş Paneli Ekleyerek Kendi Kendini Şarj Eden Sistem
✔️ Robotunuzu AI Destekli Yapay Zeka ile Geliştirme
📌 Ekstra: Sesli komutlarla robotunuzu kontrol etmek için bir mikrofon ve ses tanıma modülü ekleyebilirsiniz!
🎯 Bu rehber sayesinde Arduino ile kendi robotunuzu yapmayı öğrendiniz!
💡 Özetle:
✔️ Robotun gövdesini karton, plastik veya 3D baskı kullanarak yaptınız.
✔️ Motorları ve sensörleri Arduino ile bağlayarak elektronik devreyi tamamladınız.
✔️ Engellerden kaçabilen bir robot kodladınız ve test ettiniz.
✔️ Bluetooth veya Wi-Fi ekleyerek robotunuzu uzaktan kontrol ettiniz.
📢 Sizce en iyi robot projesi nasıl olmalı? Yorumlarda paylaşın! 👇😊





 News
News










Yorum Yaz